Introduction#
Events in robotics history#
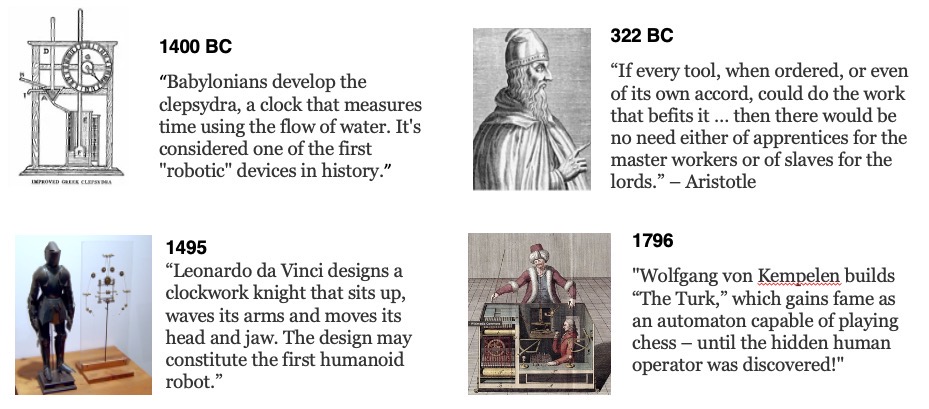
Fig. 1 History of robotics (old)#
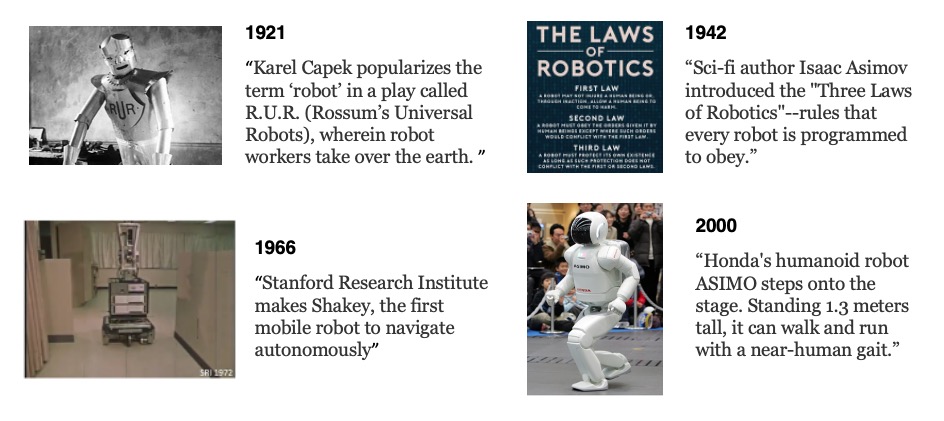
Fig. 2 History of robotics (modern)#
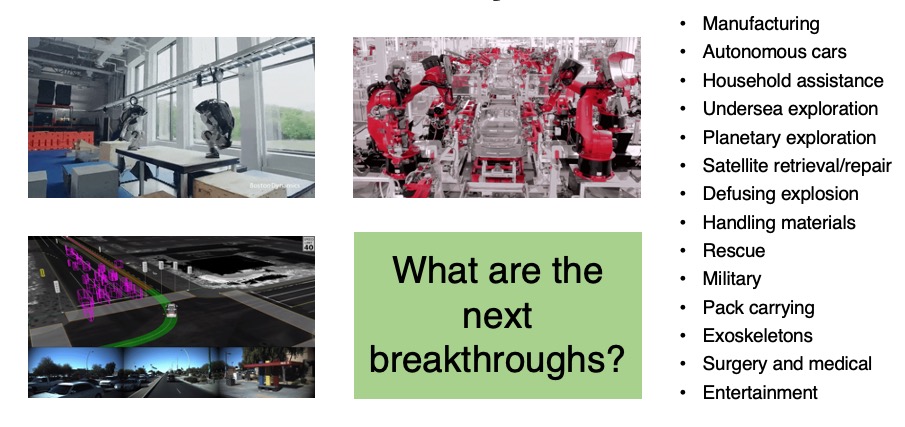
Fig. 3 History of robotics (nowdays)#
Robotics vs. Artificial Intelligence#
Robots are usually physically embodied
Artificial Intelligence is usually not
Anatomy of a robotic system#
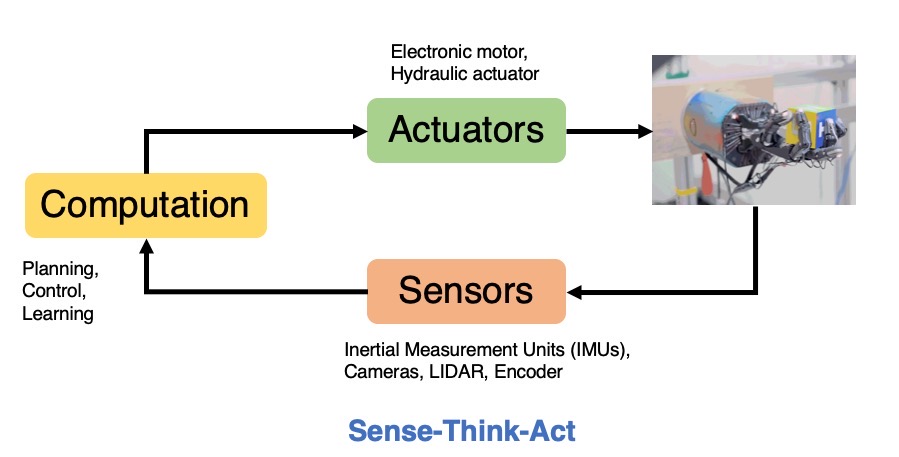
Fig. 4 Anatomy of a robotic system#
Robot modelling & control
Optimization
Optimal control
Safety and collision avoidance
Manipulation
Robot learning
Motion planning
Navigation and mapping
Multi-robot coordination
Human-robot interaction
Force and tactile sensing
Computer vision
Range sensing
Sensor fusion
Mechanisms
Actuators
Kinematics/dynamics
Bioinspired design
Manipulators & graspers
Legged
Mobile
Aerial
Underwater
Micro/nano
Manufacturing
Parallel robots
Soft robots
About the IRIS Lab#
The Intelligent Robotics and Interactive Systems (IRIS) Lab focues on:
Human robot alignment: We develop methods to empower a robot with the ability to efficiently understand and be understood by human users through a variety of physical interactions. We explore how robots can aptly respond to and collaborate meaningfully with users.
Contact-rich robot manipulation: We leverage physical principles to derive representations/models that enable robots to interact efficiently with their surroundings. We develop algorithms to enable robots manipulate objects through contact efficiently and robustly.
Fundamental methods in robotics: We focus on developing fundamental theories and algorithms for achieving efficient, safe, and robust robot intelligence. Our methods lie at the intersection of model-based (control and optimization) and data-driven approaches, harnessing the complementary benefits of both.
The IRIS lab is constantly seeking robotics enthusiasts to join the lab. Anyone interested in joining could apply here: https://asu-iris.github.io/joining/