where \(\boldsymbol{q}=\left[q_{1},\ldots, q_{n}\right]^{T}\). The goal of
the differential kinematics is to find the relationship between the
joint velocities and the end-effector linear and angular velocities. In
other words, we want to find end-effector linear velocity
\(\dot{\boldsymbol{p}}_{e}\) and angular velocity
\(\boldsymbol{\omega}_{e}\) as a function of the joint velocities
\(\dot{\boldsymbol{q}}\).
This expression shows how \(\dot{\boldsymbol{p}}_{e}\) can be obtained as
the sum of the terms \(\dot{q}_{i} \boldsymbol{J}_{P i}\) Each term
represents the contribution of the velocity of single Joint \(i\) to the
end-effector linear velocity when all the other joints are still.
\[\begin{split}\label{c2.l1.equ5}
\left[\begin{array}{l}
\boldsymbol{J}_{P i} \\
\boldsymbol{J}_{O i}
\end{array}\right]= \begin{cases}{\left[\begin{array}{c}
\boldsymbol{z}_{i-1} \\
\mathbf{0}
\end{array}\right]} & \text { for a prismatic joint } \\[14pt]
{\left[\begin{array}{cc}
\boldsymbol{z}_{i-1} \times\left(\boldsymbol{p}_{e}-\boldsymbol{p}_{i-1}\right) \\
\boldsymbol{z}_{i-1}
\end{array}\right]} & \text { for a revolute joint. }\end{cases}\end{split}\]
The above allow Jacobian computation in a simple, systematic way on the
basis of direct kinematics relations. In fact, the vectors
\(\boldsymbol{z}_{i-1}, \boldsymbol{p}_{e}\) and \(\boldsymbol{p}_{i-1}\)
are all functions of the joint variables.
In particular, \(\boldsymbol{z}_{i-1}\) is given by the third column of
the rotation matrix \(\boldsymbol{R}_{i-1}^{0}\), i.e.,
where
\(\boldsymbol{z}_{0}=\left[\begin{array}{lll}0 & 0 & 1\end{array}\right]^{T}\)
allows the selection of the third column. \(\boldsymbol{p}_{e}\) is the
first three elements of the fourth column of the transformation matrix
\(\boldsymbol{T}_{e}^{0}\), i.e., by expressing
\(\widetilde{\boldsymbol{p}}_{e}\) in the \((4 \times 1)\) homogeneous form
where
\(\widetilde{\boldsymbol{p}}_{0}=\left[\begin{array}{llll}0 & 0 & 0 & 1\end{array}\right]^{T}\)
allows the selection of the fourth column. \(\boldsymbol{p}_{i-1}\) is the
first three elements of the fourth column of the transformation matrix
\(\boldsymbol{T}_{i-1}^{0}\),
for the Euler ZYZ Angle minimal representation
\({\boldsymbol{\phi}}_{e}=[{\varphi}, {\vartheta}, \psi]^T\).
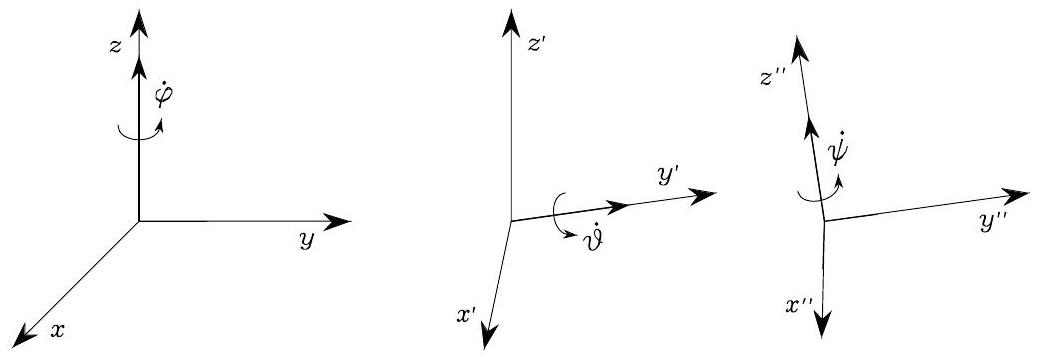
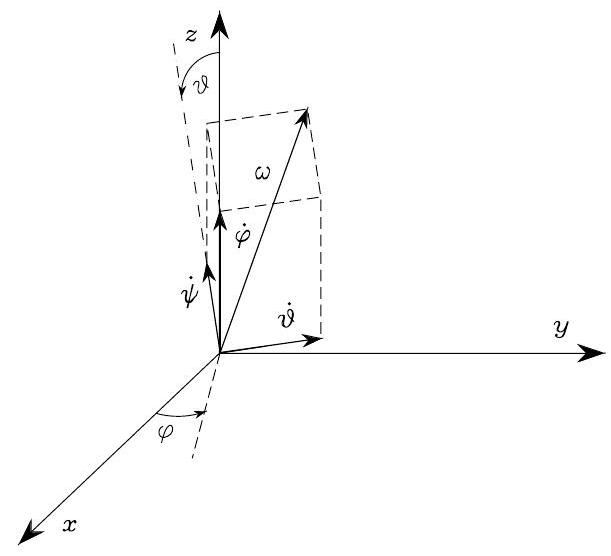
Consider the Euler ZYZ Angle, the vectors corresponding to the
rotational velocities \(\dot{\varphi}, \dot{\vartheta}, \dot\psi\) have
been represented with reference to the current frame. The next figure
illustrates how to compute the contributions of each rotational velocity
to the components of angular velocity about the axes of the reference
frame.
Fig. 52 Rotational velocities of Euler angles ZYZ in current
frame#
Fig. 53 Composition of elementary rotational velocities for computing angular
velocity#
The corresponding angular velocity for \(\dot{\varphi}\) is
\(\dot{\varphi}\left[\begin{array}{lll}0 & 0 & 1\end{array}\right]^{T}\)
The corresponding angular velocity for \(\dot{\vartheta}\) is
\(\dot{\vartheta}\left[\begin{array}{lll}-s_{\varphi} & c_{\varphi} & 0\end{array}\right]^{T}\)
The corresponding angular velocity for \(\dot{\psi}\) is
\(\dot{\psi}\left[\begin{array}{lll}c_{\varphi} s_{\vartheta} & s_{\varphi} s_{\vartheta} & c_{\vartheta}\end{array}\right]^{T}\),
Takeaway: From a physical viewpoint, the meaning of \(\omega_{e}\) is
more intuitive than that of \(\dot{\boldsymbol{\phi}}_{e}\). The three
components of \(\boldsymbol{\omega}_{e}\) represent the components of
angular velocity with respect to the base frame. Instead, the three
elements of \(\dot{\phi}_{e}\) represent nonorthogonal components of
angular velocity defined with respect to the axes of a frame that varies
as the end-effector orientation varies. On the other hand, while the
integral of \(\dot{\phi}_{e}\) over time gives \(\phi_{e}\), the integral of
\(\omega_{e}\) does not admit a clear physical interpretation, as can be
seen in the following example.