Derivative of Transformation#
Consider a time-varying rotation matrix \(\boldsymbol{R}=\boldsymbol{R}(t)\). One has
Differentiating the above equation with respect to time gives
with the newly defined \(\boldsymbol{S}(t)=\dot{\boldsymbol{R}}(t) \boldsymbol{R}^{T}(t)\) being called a \((3 \times 3)\) skew-symmetric matrix, and
Next, let’s find the physical interpretation of \(\boldsymbol{S}\).
Consider \({\boldsymbol{R}}(t)\) represents a rotation of a moving frame \(O'-x'y'z'\) with respect to a fixed reference frame \(O-xyz\). It means the following coordinate transformation \(\boldsymbol{p}(t)=\boldsymbol{R}(t) \boldsymbol{p}^{\prime}\). Taking the derivative of both sides yields
where we have used the defined skew-symmetric matrix \(\boldsymbol{S}(t)\), and considered \(\boldsymbol{p}^\prime\) is fixed in the moving frame.
Recall that in the mechanics courses, given the angular velocity \(\boldsymbol{\omega}(t)=\left[\begin{array}{lll}\omega_{x} & \omega_{y} & \omega_{z}\end{array}\right]^{T}\) of the moving frame \(O'-x'y'z'\), with respect to the fixed frame, we also write the derivative as
Comparing the above two equations, we can conclude
Hence, we can conclude the derivative of a rotation matrix is $\(\dot{\boldsymbol{R}}=\boldsymbol{S}(\boldsymbol{\omega}) \boldsymbol{R}\)$
Note that in the above equation, \(\boldsymbol{\omega}\) is expressed in the fixed frame.
One property of \(\boldsymbol{S}(\boldsymbol{\omega})\): if \(\boldsymbol{R}\) denotes a rotation matrix, it can be shown that the following relation holds:
Derivative of Pose Transformation#
Pose transformation defines coordinate mapping of a point \(P\) from frame \(O_1-x_1y_1z_1\) to frame \(O_0-x_0y_0z_0\)
Differentiating the above equation with respect to time yields
Since \(\boldsymbol{R}_{1}^{0} \boldsymbol{p}^{1}=\boldsymbol{p}_{1}^{0}\),
Notice that, if \(\boldsymbol{p}^{1}\) is fixed in Frame 1 , then it is
Manipulator Link Velocity#
Consider the Link \(i\) of a manipulator. According to DH convention, the pose of Link \(i\) defines the transformation between Frame \(i-1\) and Frame \(i\), as shown in the following figure below.
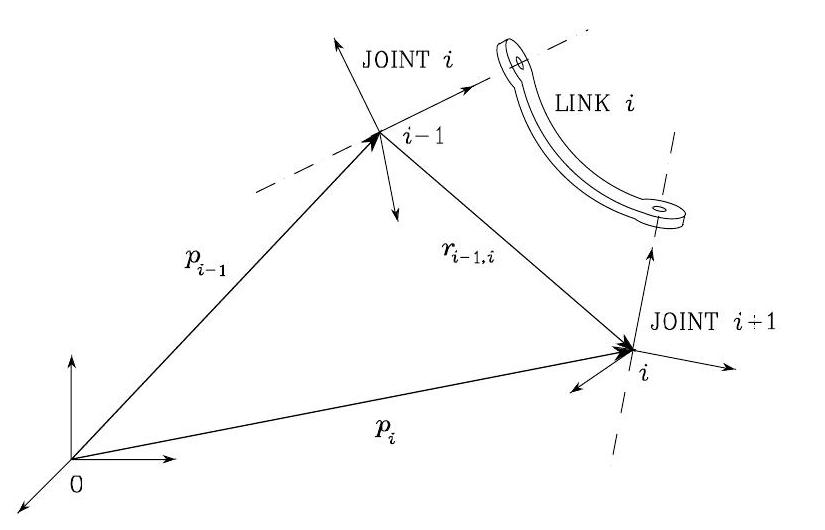
Fig. 48 Characterization of generic Link \(i\) of a manipulator#
Linear Velocity#
Let \(\boldsymbol{p}_{i-1}\) and \(\boldsymbol{p}_{i}\) be the position of the origins of Frames \(i-1\) and \(i\), respectively. Also, let \(\boldsymbol{r}_{i-1, i}^{i-1}\) denote the position of the origin of Frame \(i\) with respect to Frame \(i-1\) expressed in Frame \(i-1\).
Based on the derivative of pose transformation, we have
which gives the linear velocity of Link \(i\) as a function of the translational and rotational velocities of Link \(i-1\).
Angular Velocity#
Since
Its time derivative
where \(\boldsymbol{\omega}_{i-1, i}^{i-1}\) denotes the angular velocity of Frame \(i\) with respect to Frame \(i-1\) expressed in Frame \(i-1\). The second term on the right-hand side can be rewritten as
by recalling the property of the skew-symmetric matrix. Then,
leading to
which gives the expression of the angular velocity of Link \(i\) as a function of the angular velocities of Link \(i-1\) and of Link \(i\) with respect to Link \(i-1\).
Summary#
Considering different types of Joint \(i\), according to the above derivative of linear velocity and angular velocity, we have the following conclusions.
If Joint \(i\) is prismatic
If Joint \(i\) is revolute